Survey and Navigation Solutions
NavView
Maximize the potential of NavView to take your next project to new heights. Its powerful features and intuitive interface are designed to enhance your workflow, facilitate seamless collaboration, and simplify even the most complex tasks. By fully harnessing NavView, you will boost productivity, ensure precise project tracking, and achieve your objectives with unmatched efficiency. Don't miss out on this opportunity to elevate your project management capabilities.
With NavView, you can achieve real-time awareness of 3D elements, including the seafloor, subsea structures, pipelines, umbilicals, anchors, and cables, ensuring smooth and precise positioning on every offshore job.ure, pipelines, umbilicals, anchors, and cables, to ensure smooth, precise positioning on every offshore job

User-friendly interface

Built by marine experts

Precise positioning on every offshore job
Real-time 3D awareness of operations
Offshore component of 4D Nav's remote solution


comprehensive construction features
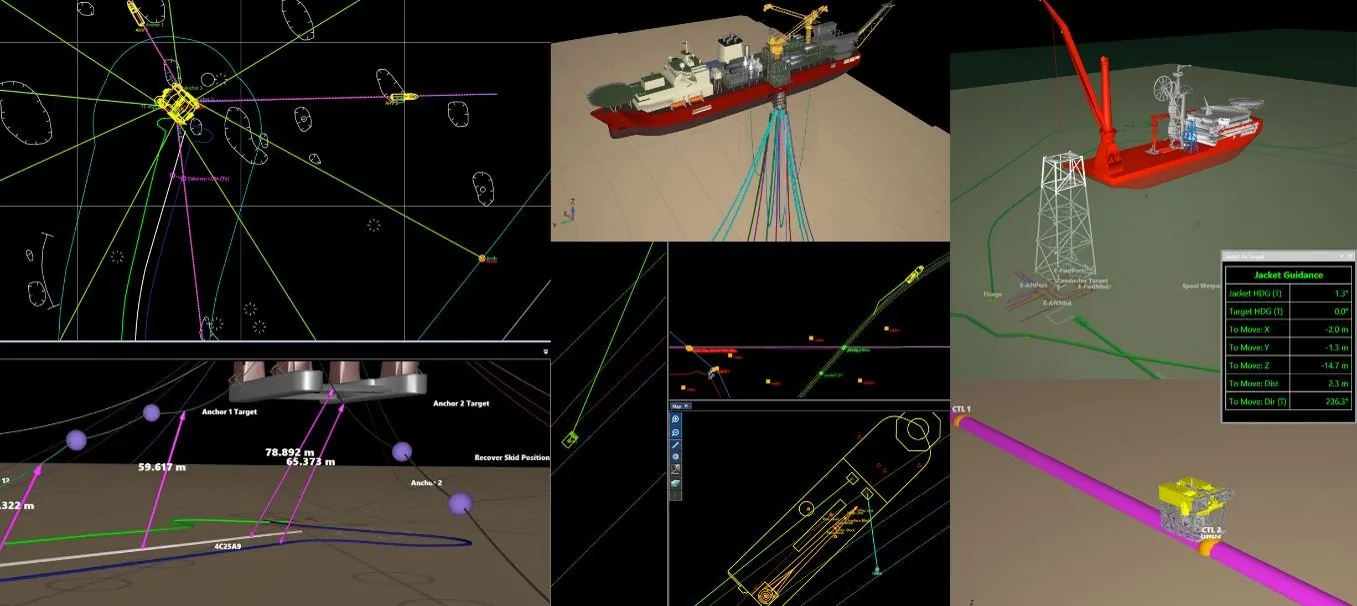
With NavView's comprehensive construction management features, you can use NavView to maintain and oversee every aspect of your offshore construction project.
Heavy lift operations are supported by combining MRU data input with NavView's Remote Motion Calculation to provide real-time linear and angular velocities and accelerations in 3 dimensions for both static and dynamic locations on a vessel, including crane tips. This is visualized in 2D and 3D with NavView's dynamic Articulated Frame feature.
NavView also uses its 3D capabilities in cut-to-length calculations and riser touch-down monitoring ultimately enhancing project efficiency and safety
intuitive anchor controls
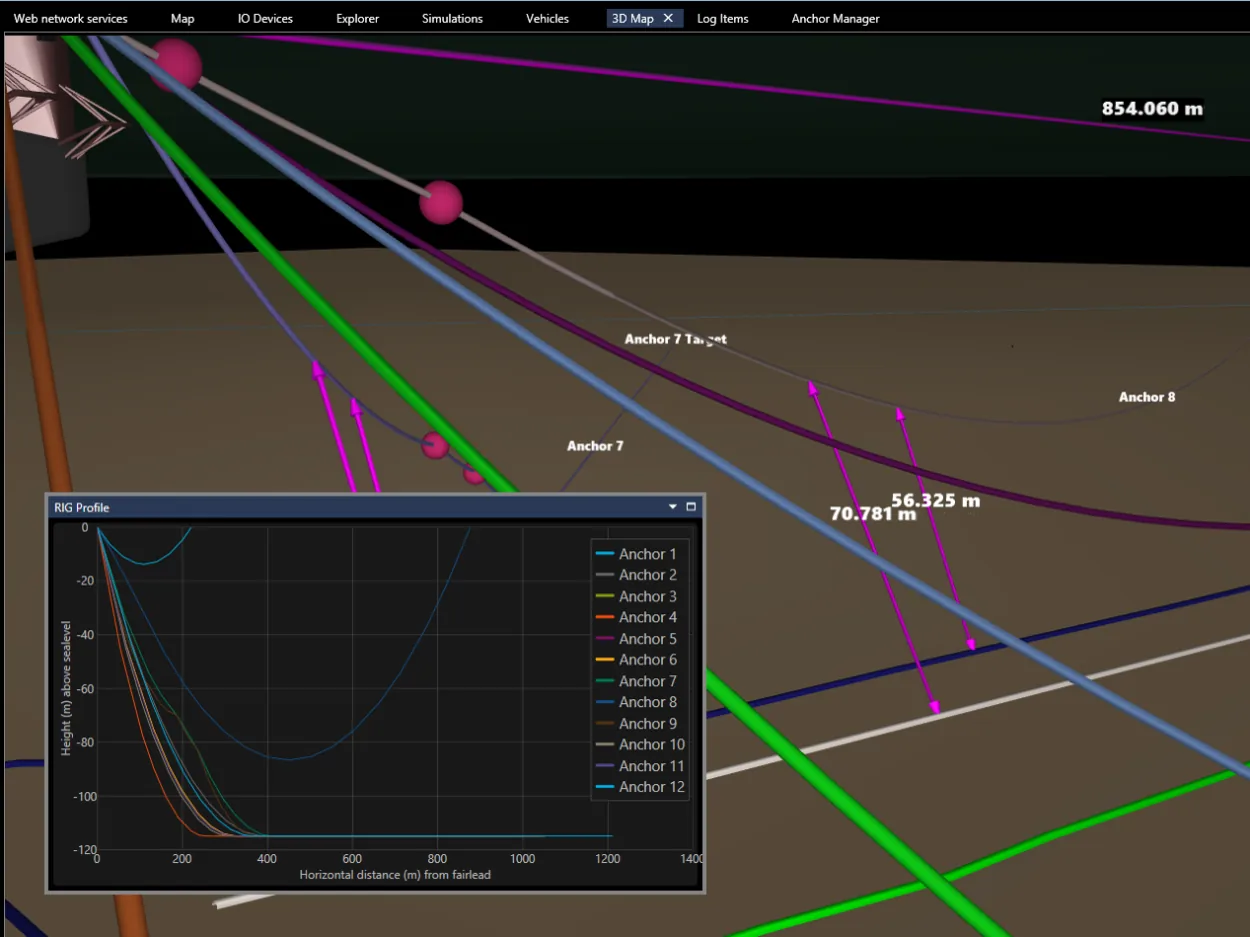
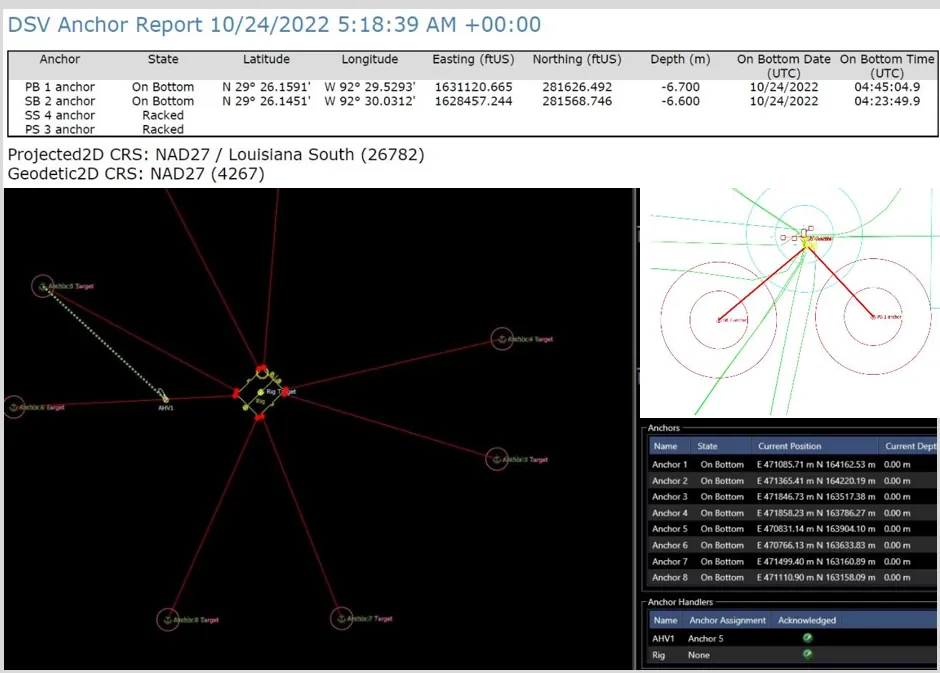
NavView implements a set of features that provides industry-leading anchor handling calulations, control and display.
NavView's user-friendly interface enables all-in-one anchor management that's convenient and intuituve
- 2D map windows displays all vessels, anchors, and anchor lines clearly
- 3D catenary modeling enhances the safety of your anchor operations and provide spatial visualization
- Communication between vessels with serial or network radios

Accurate Rig Move Assistance
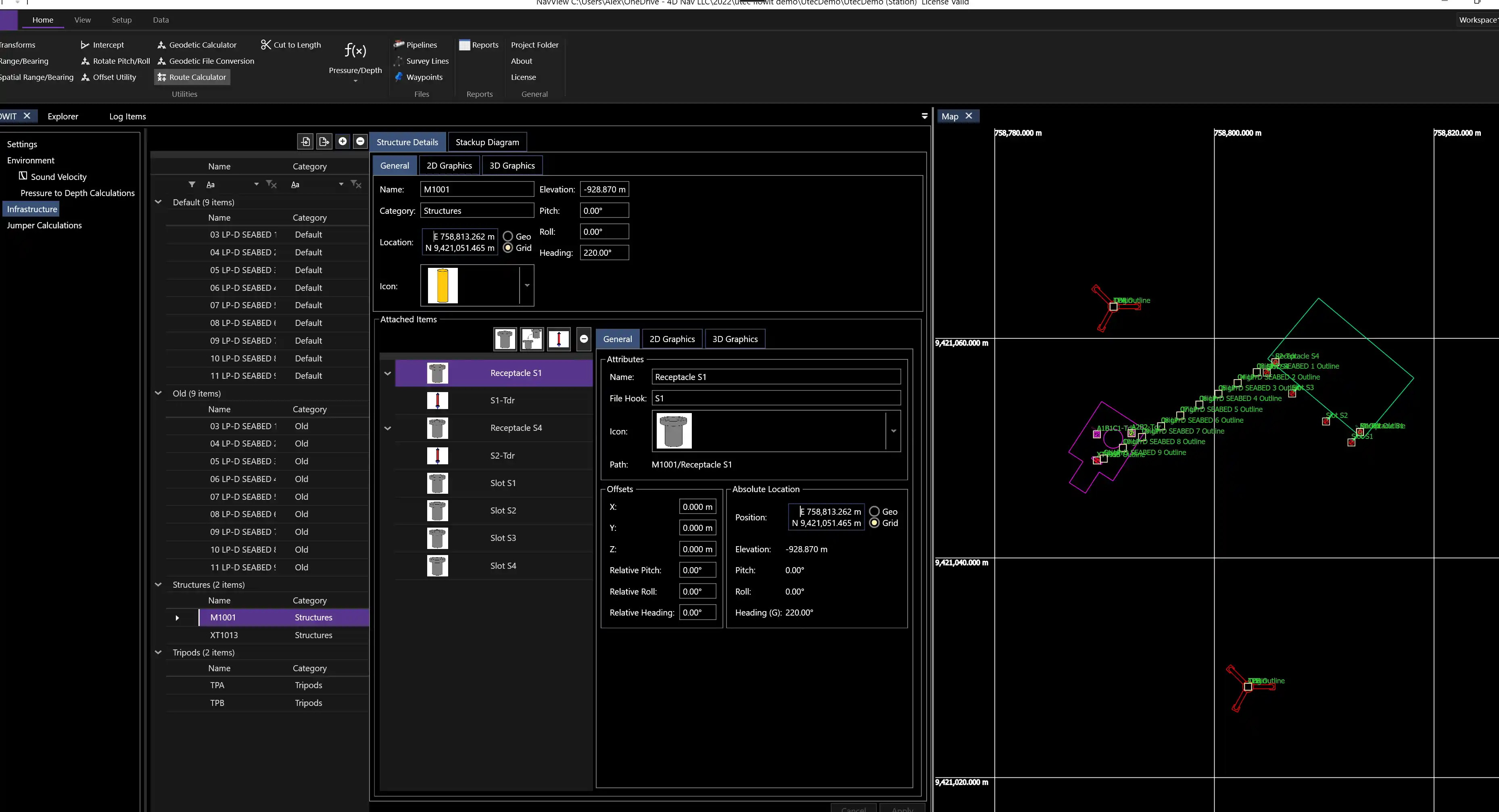
With built-in features designed to accurately move offshore rigs with ease, NavView includes advanced subsea visualization and move planning tools.
NavView's rig move features
- Easy integration with rig and ROV real-time positioning sensors
- Multi-stage graphical rig move planning tools
- Subsea hazard search and reporting
- 2D and 3D subsea field visualization
- OrcaFlexTM Integration
Industry-leading technology you can count on
metrology
4D Nav's metrology solution allows you to perform consistent calculations and streamline subsea metrology operations. This application provides offshore teams with an all-in-one solution for project planning, data collection, analysis, and LBL network adjustments. The application will then use the finalized data to perform the critical metrology calculations and complete the reporting process.

Remote LBL
4D Nav’s remote LBL/INS solution (RLBL) significantly enhances our well-established NavView Remote Survey capability by offering comprehensive remote control over Sonardyne’s 6G and 6G+ LBL transceivers, along with Sprint Inertial Navigation Systems (INS). This integrated solution features seamless video and voice communications, allowing operators to monitor and control operations in real-time.
Remote Survey
Achieve sustainable growth with professional, expert remote support tailored to your needs. Our experienced team is dedicated to providing you with the guidance and assistance necessary to optimize your operations and enhance your overall efficiency, all from the convenience of a remote setup.
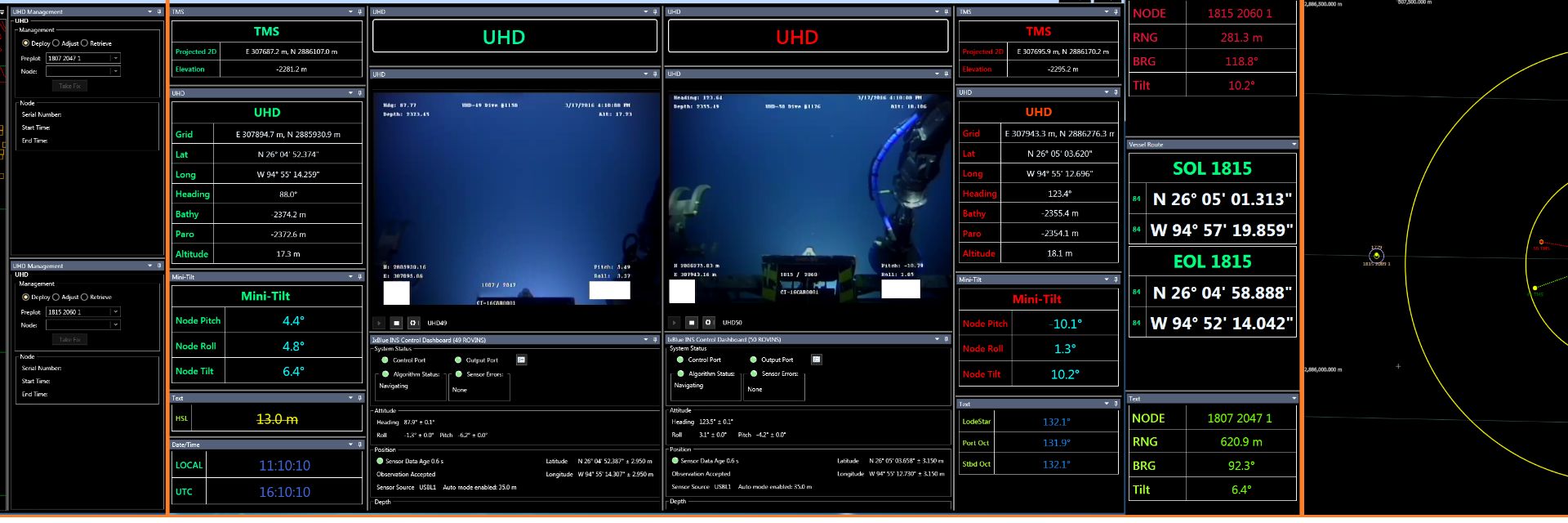
Node Dashboard
4D Nav's metrology solution allows you to perform consistent calculations and streamline subsea metrology operations. This application provides offshore teams with an all-in-one solution for project planning, data collection, analysis, and LBL network adjustments. The application will then use the finalized data to perform the critical metrology calculations and complete the reporting process.
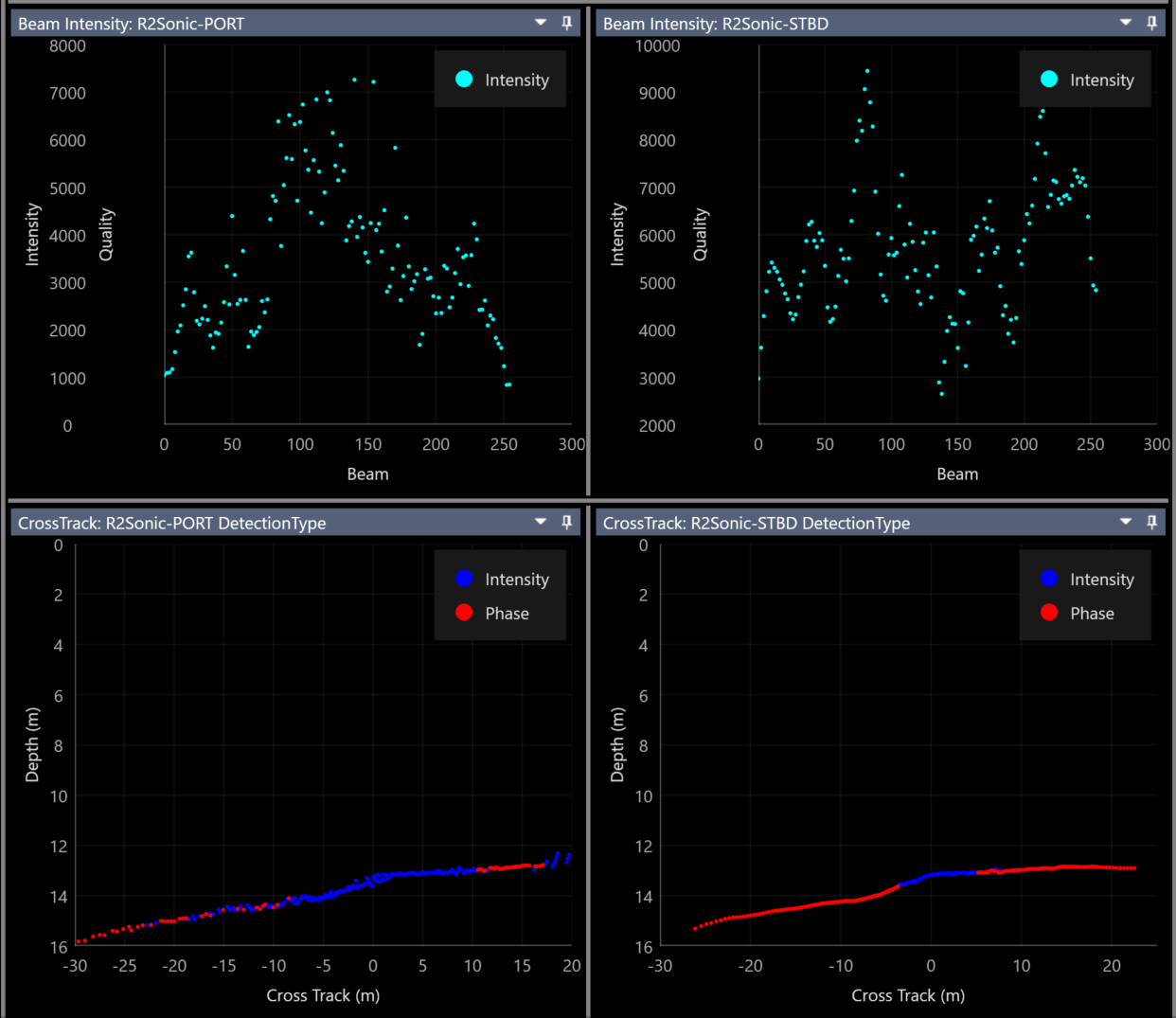
Multibeam
Introducing an innovative multibeam acquisition software package, crafted specifically with the needs of our customers in mind. Experience unparalleled precision and efficiency tailored to enhance your workflow and elevate your projects.
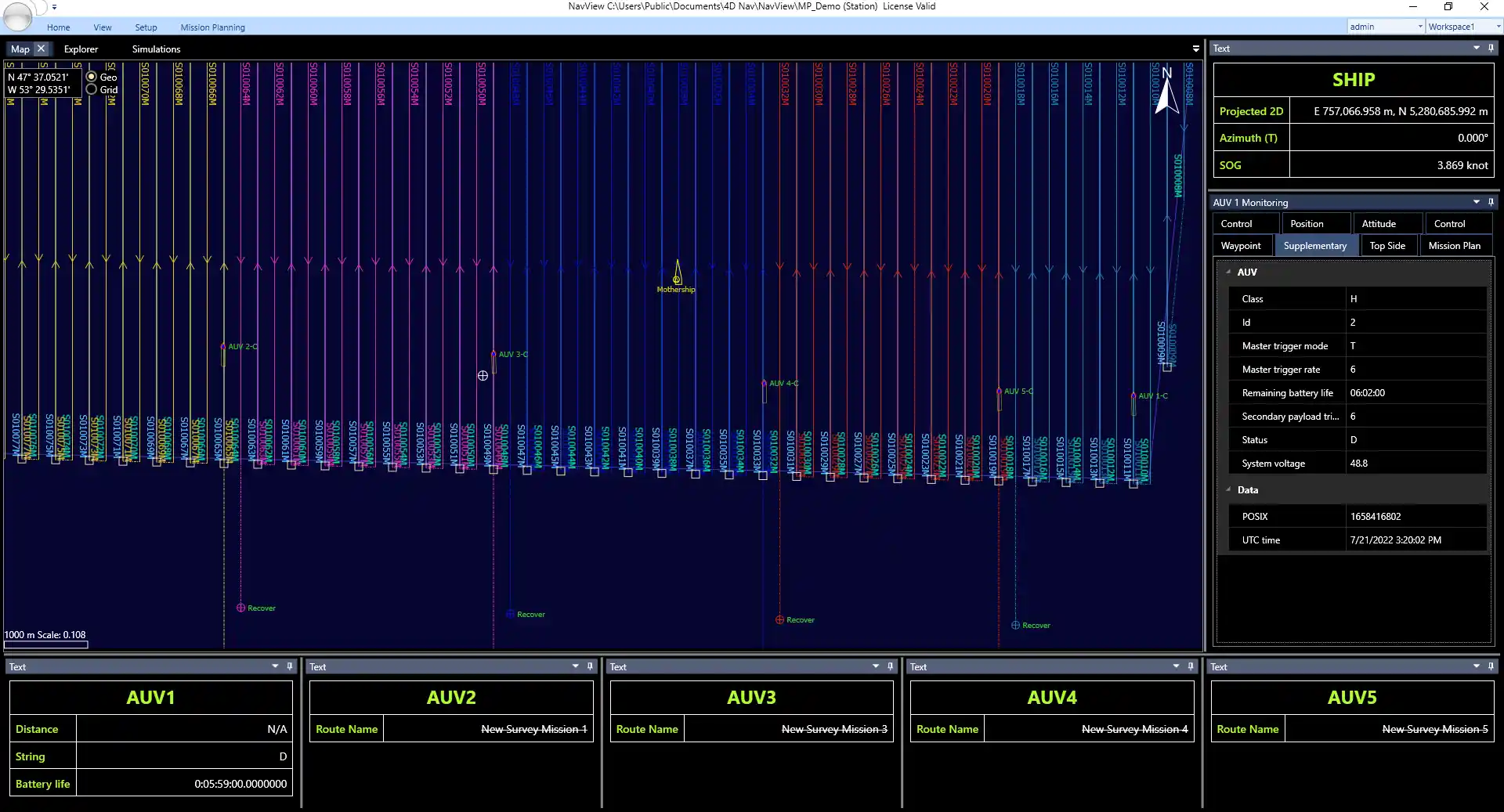
AUV & USV Mission Planning
Plan and Monitor your AUV and USV Mission in One Place
4D Nav's multi-vehicle AUV and USV mission planning and monitoring solution includes features that streamline the planning, monitoring, and control processes into an efficient all-in-one tool. This planning tool utilizes NavView's powerful architecture and customized features to enable seamless mission planning..
Ensure streamlined and safe offshore operations
For more information about our industry leading software, please reach out to schedule a demo.
BOOK A CALL